Znáte to, sem tam zapomenete zalít kytky a ony povadnou. Buď to stihnete ještě přelít, nebo vám odejdou do zeleného nebe (rozuměj do kompostu). Já mám balkon, respektive lodžii orientovanou na jihozápad. Je to sice skvělé na jaře a na podzim, kdy vyvalení s kávičkou koukáte na krásný západ slunce, v letních měsících je to ale problém. Teplota během dne i s úplně otevřenými skly lodžie dosahuje mnohdy až 38 °C. V těchto podmínkách je potřeba řešit téměř trvalou závlahu, což pro nás, tvrdě pracující lid, bývá dost problematické.
Kapková závlaha (2021)
Vloni jsem zkusil kapkovou závlahu. Konceptuálně parádní low-cost řešení skončilo fiaskem. Kapková závlaha se hodí pro rostliny zvyklé na trvalou závlahu a hlavně pro kontejnery s otvory nebo úplně bez dna, což v mém případě uzavřené lodžie s koberečkem není možné. Celý pokus skončil několika potopami nebo vyprahnutím květináčů. :)

Kanystr s řešením samospádem
Výhody kapkové závlahy
- do jisté míry regulovatelná rovnoměrná závlaha
- neřeším tolik změny tlaku v hadici způsobené převýšením (police v regálu)

Nevýhody kapkové závlahy
- nezohledňuje změny počasí, zejména teploty a umístění jednotlivých květináčů (slunce/stín),
- zanáší se řasami kvůli mírnému proudění vody a působení slunce,
- hadice jsou trvale pod tlakem a při vyšších teplotách povolily některé spoje měkkých hadic,
- ve vysokých teplotách se voda ani nestihla vsakovat a odpařovala se na povrchu hlíny

V případě jahod je kapková závlaha velmi nevhodná. Při trvalé vláze vám zahnijí kořínky.
Všechny výhody a nevýhody řešení jsem zohlednil a přišel na možné řešení. Co bylo největší nevýhodou kapkové závlahy? Nádrž s vodou, v mém případě kanystr, působil vlivem převýšení neustálým tlakem a v hadicích v podstatě stála voda. Při zanesení zalévacích otvorů nebo povolení spoje vždycky vznikl velký problém vyžadující opravu (nebo sušení koberce).
Změna vyžaduje umístění nádrže s vodou pod úroveň květináčů tak, aby v hadicích nezůstávala zbytečně voda. A tak vznikl nápad, že si koupím další Raspberry Pi.
 Raspberry Pi Pico – zdroj farnell.com
Raspberry Pi Pico – zdroj farnell.com
Automatický zavlažovací systém alias žena, která se postará, i když nejste doma
Když jsem si dohledal, že teď frčí mikropočítač RP2040 od Raspberry Pi, začal jsem si zjišťovat, jestli je možné ho využít pro tuto aplikaci. Ideální v jeho případě je to, že má minimální spotřebu, má GPIO a je možné ho velice jednoduše programovat přes MicroPython. Bylo rozhodnuto, teď jen vymyslet funkční řešení.
Každé video nebo návod na automatické zavlažování buď pomocí Arduina, klasického Raspberry Pi, Zero nebo už Pica obsahovalo velmi strohý koncept, většinou dost nedotažený do konce. Já jsem si řekl, že musí být systém naprosto bezúdržbový. Něco jako instantní polévka ze sáčku. Stačí přidat vodu. Rázem jsem narazil na několik komplikací.
Energie
První, co mě napadlo, byly baterie 18650, které jsem již dlouhou dobu měl. Mám ty s čudlíkem. Mají ochranu proti přebití, podbití i zkratu. To je pro mě ideální, protože je budu mít paralelně a baterie si tak budou napětí mezi sebou vyrovnávat nezávisle. Sehnal jsem k nim bez rozmyslu dva malé 200 mA solární panely. Při zapojení mi došlo, že napájecí napětí Pico se pohybuje mezi 3,3 V – 5,5 V. Solární panel dosahuje ve špičce bez zátěže klidně 6,5 V. Navíc jsou dva paralelně zapojené, a tak se jim zátěž dělí na polovic. Jakmile dojde při slunném dni k nabití obou článků, odpojí je jejich vlastní elektronika. Zátěží tak bude jen Pico a trocha elektroniky kolem. To může být problém. Kdyby solární panely dokázaly dodat dostatek, napětí by se mohlo nekontrolovatelně dostat nad 5,5 V a Pico se začne pomaličku smažit. Pořídil jsem mezi solární panely a baterie malý MPPT regulátor. Ten si vše hlídá sám a nepustí nic nad 4,2 V. Po nabití spadne na 3,7 V. Pico se proto celou dobu bude pohybovat v přijatelných hodnotách.
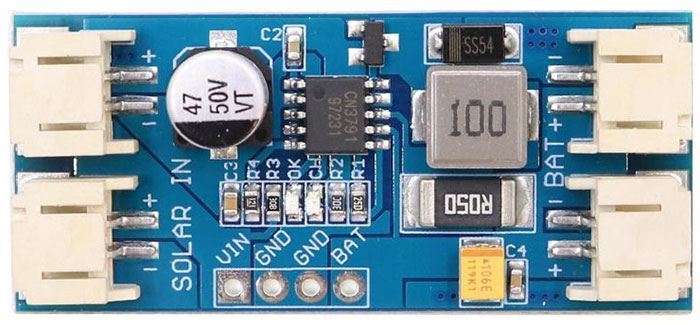
MPPT regulátor na 6V do 2A – zdroj hadex.cz

Baterie 18650 – zdroj mall.cz

6V – max 200 mA – zdroj dratek.cz
Skoro to vypadalo, že mám vše vyřešené a pak jsem začal počítat. Spotřeba se teoreticky pohybuje kolem 23 mA plus opakované proudové špičky od čerpadel v řádu několika stovek mA. Solární panely ale reálně při zataženém dni nedodají víc než 10% výkonu. Je tedy jasné, že většinu dne pojede počítač na baterie a panely nebudou skoro stíhat ani dobíjet. Proto jsem zvolil vyšší kalibr a současným dvěma malým panelům dokoupím ještě dva 4,5W.

520 mA, 4,5W, 6V – zdroj hadex.cz
Panely tak při správném umístění dodají vždy o něco navíc a baterie jsou proto reálně během dne jen jako vyrovnávací záloha při vyšším odběru a během noci udržují systém v chodu.
Květináč na slunci a ve stínu
U kapkové závlahy byl další problém nevyváženost zastíněných květináčů a těch vystavených slunci. Na balkoně mám po stranách 2 regály, zastíněnou poličku na vnější stěně, parapet u okna na přímém slunci a truhlíky u země pod oknem. S ohledem na převýšení a působení slunce jsem vše rozdělil na 4 zóny. Každá zóna bude mít jedno čerpadlo s vlastním zásobníkem vody a jedno čidlo půdní vlhkosti v referenčním květináči. Tedy ani ne moc velkém nebo malém. Na základě jeho dat bude systém nezávisle vyhodnocovat, kdy kterou zónu zalít. Nebude proto docházet k přemokření květináčů ve stínu ani k vysoušení těch na slunci.

Zásobník o objemu 10 litrů s čerpadlem pod hladinou
Koroze čidla
Čidlo vlhkosti půdy je za pár korun. Jeho špatná pověst jej předchází. Rádo totiž koroduje, protože je vystaveno neustále vlhké půdě a elektrickému proudu. Anoda logicky degraduje. Předběžně se problému snažím čelit přímým ovládáním napájení každého čidla. GPIO oficiálně pustí na pinu maximálně 19 mA. Čidlo má spotřebu do 10 mA a spouští se na střídačku. Proto můžu čidla napájet přímým výstupem signálu z GPIO. Je pod napětím na krátkou chvilku v době měření (cca 500 ms), zbytek času je jen uzemněné, tedy žádný proud jím neprochází.
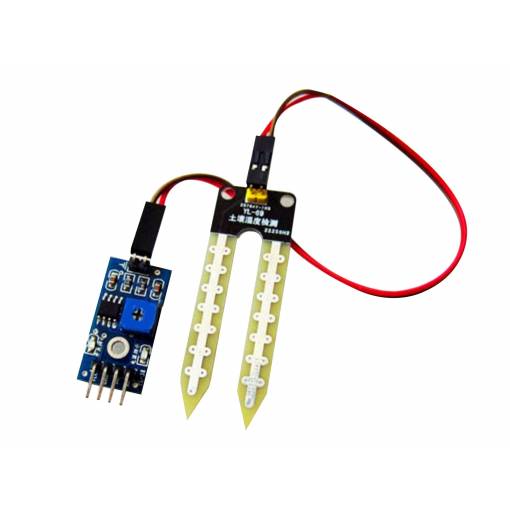
Půdní vlhkoměr za pár korun – zdroj dratek.cz
Na trhu je pro podobné aplikace oblíbené kapacitní čidlo, které mi ale zatím přijde zbytečné. Systém již měsíc běží a viditelná koroze na čidlech zatím stále není.
Nedostatečné napětí pro čerpadla
Protože vše běží v rozmezí 3,7 – 4,2 V, na nějaké silnější motory můžeme předem zapomenout. Pokud tedy nepoužijeme step-up měnič a ovládání relé deskou s optočleny na vstupu. Já si zvolil čerpadla na 6 V. Vytlačí cca 100 cm, krátkodobě zvládnou i 6,5 V. Při 6,35 V, které mám momentálně nastavené, vytlačí vodu do 130 cm, což je dostačující. Protože budu zalévat v kratších intervalech (cca 9 – 17 sekund) s přestávkami, nemělo by vyšší napětí na čerpadlech dělat neplechu. Díky optočlenům se nemusím bát připojit relé desku přímo na GPIO. Li-Ion baterky mírnou proudovou zátěž zvládnou hravě.

Čerpadlo na 6V, výtlak cca 100 cm – zdroj dratek.cz
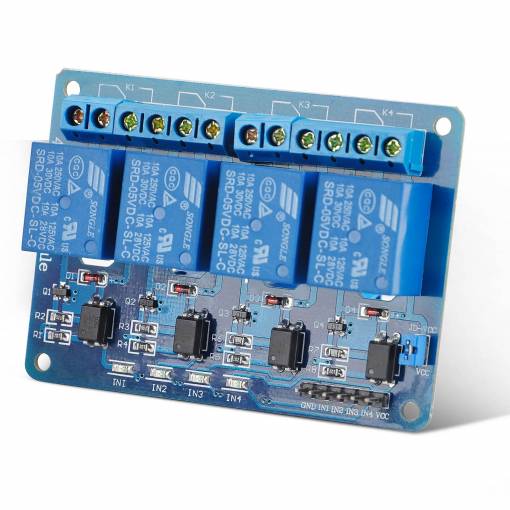
Relé deska se 4 výstupy 1NO/1NC – zdroj dratek.cz

Step-up měnič SX1308 – zdroj laskakit.cz
Step-up měnič je v tomto případě skvělý v tom, že díky němu dokážu kompenzovat výchylky napětí na bateriích a útlum způsobený ztrátami na dlouhých vodičích. Pico bude na jedné straně balkonu, čerpadlo bude na téměř 8m vodiči. V zalévání se budou střídat, proto nebude docházet k příliš velkému zatížení. Při častějším zalévání kvůli teplejšímu počasí lze logicky předpokládat vyšší sluneční aktivitu. Panely jsou schopny odběr čerpadel s klidem kompenzovat.
Řasy v hadicích
Protože u kapkové závlahy vlivem tepla, slunce a pomalu proudící vody zarostly hadice a otvory se značně ucpávaly, musel jsem přehodnotit původní plán. Zpočátku jsem počítal s tím, že za každé čerpadlo umístím zpětný ventil tak, abych šetřil energii a pro zalévání stačil jen krátký impulz. K ničemu by to ale nebylo. Voda v prázdné hadici proudí vysokou rychlostí a hadice by s ventilem plné vody zase zarůstaly dál. Po vypnutí čerpadla dojde vlivem přitažlivosti zemské k okamžitému stažení vody zpět. Možné nečistoty se proudem spláchnou přes čerpadlo do nádrže a mezi cykly budou mít čas pomalu klesnout zpět ke dnu. Nemělo by proto docházet k zanášení a ucpávání.

Zarostlá hadice vlivem působení slunce na zbytkovou vodu uvnitř
Zavzdušňování čerpadel
Během ostrého provozu se rychle projevil problém se zavzdušňováním. Vzhledem k množství otvorů v celé délce hadice vznikla ve vracející se vodě spousta bublin, které zůstávaly v prostoru čerpadla klidně celé hodiny. Řešení je jednodušší, než si myslíte. Jednoduše čerpadlo před samotným zaléváním dvakrát na pár set milisekund spustím, vyženou se bubliny a hned poté se začne zalévat. Funguje to dokonale.
Výrazná změna tlaku v hadicích
Protože jedním čerpadlem zalévám ve 3 ze 4 případů více pater regálů, případně poličku nebo parapet, musím počítat s téměř exponenciálním úbytkem tlaku. V nižších patrech kompenzuji tlak kompenzátorem – proloženým kouskem kuchyňské houby uvnitř hadice, která je propustná, ale zároveň výrazně omezuje tlak. Zalévací otvory jsou co nejmenší tak, aby byly rozdíly pokud možno co nejmenší. Pro větší květináč, vzhledem k jeho objemu, musí být otvorů více. Na konci hadice jsou otvory větší nebo jich je víc. Voda tam sice už jen kape, ale poměrně rychle a z více dírek. Tato optimalizace je nejsložitější, proto vyžaduje ještě nějaký čas. Důležité zjištění již u kapkové závlahy bylo to, že otvory v hadicích musí být protaveny tenkým horkým drátkem. V případě provrtání se u takto měkkých hadic otvor smršťuje a roztahuje v závislosti na teplotě hadice a času, což je nežádoucí.

Protavená dírka velmi malého průměru

Kompenzátor tlaku pro květináče v nižší výšce
Rychlost vysoušení půdy náhlou změnou tepla
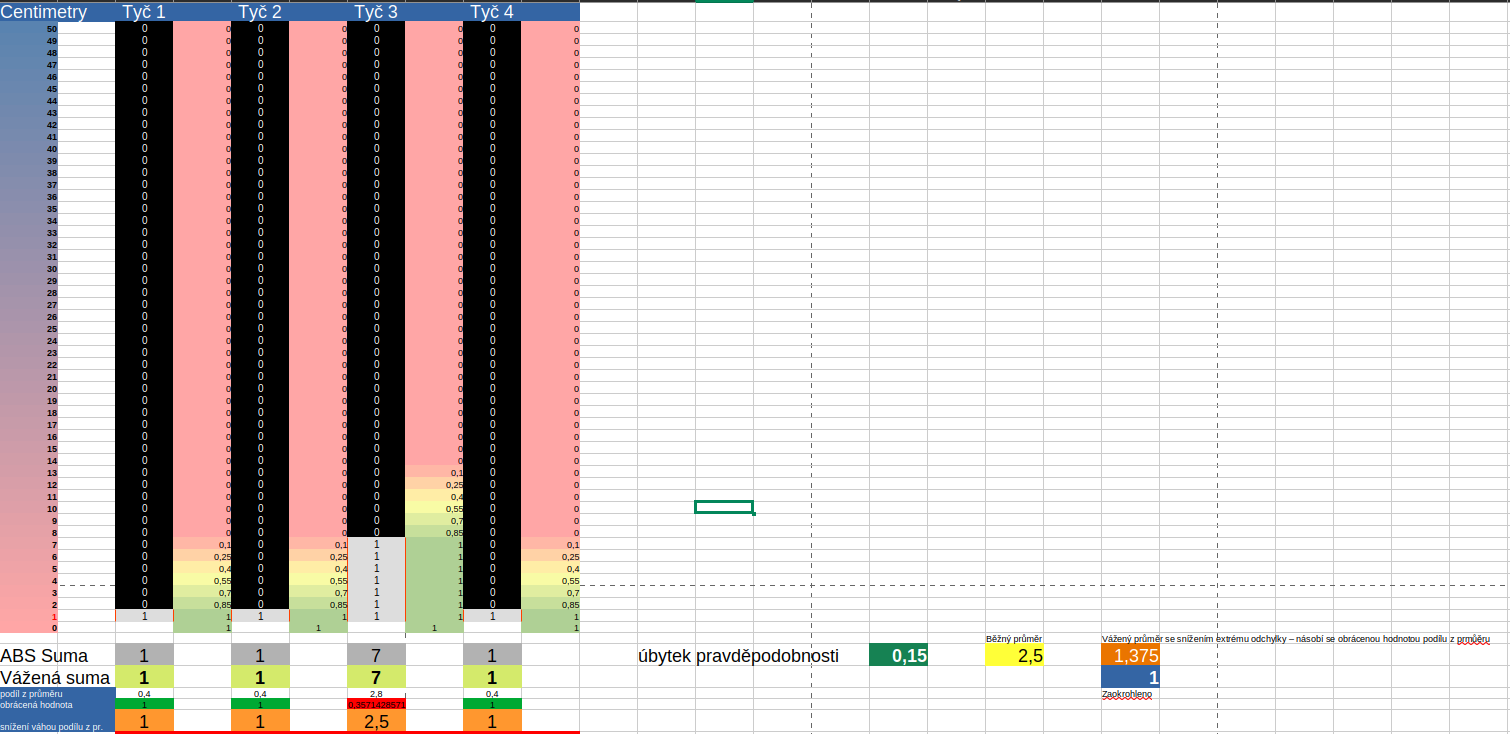
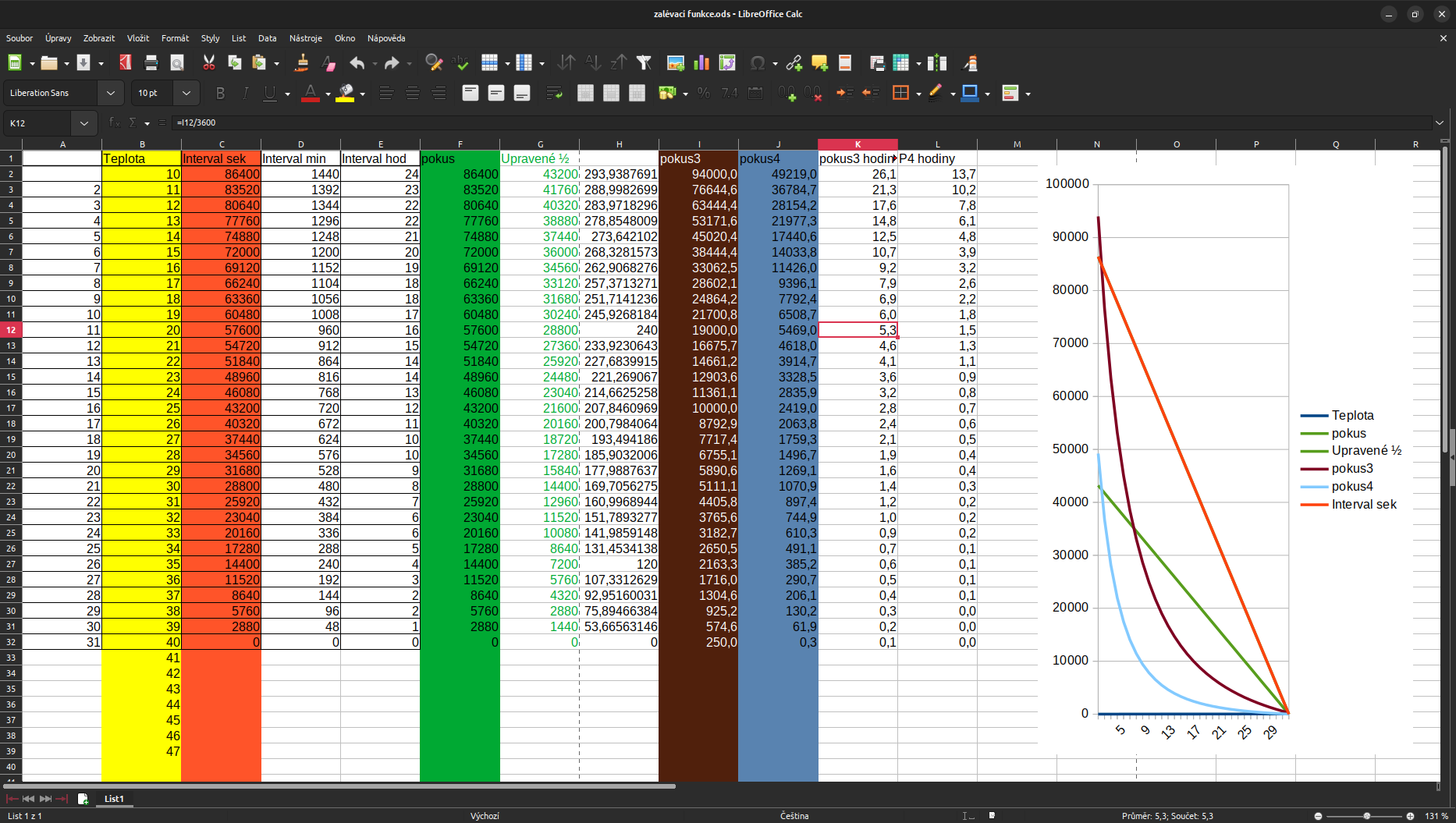
Teplo a slunce, to je jednoduše měřitelná veličina. Jak ji ale zohledňovat, to je věc druhá. Pico má v hlavním čipu integrované teplotní čidlo, k jehož datům se dá v pythonu jednoduše dostat. Já jsem prvně určil rozsah dosažitelných teplot, což je při provozu od 10 do 40 °C (zejména kvůli bateriím). Nejprve jsem v excelu vytvořil lineární oranžovou funkci, která měla při 10 °C výstup přibližně 24 hodin. Při 40 °C byl výstup 0 sekund. To znamená, že se po zalití spočítá z teploty doba spánku mezi cykly. Při bližším zamyšlení bylo jasné, že tato funkce je příliš „na pohodu“. V běžných teplotách kolem 20 ˚C by byla délka spánku třeba 10 hodin. Při náhlém prudkém slunci by doslova Pico vše zaspalo v řádu hodin.
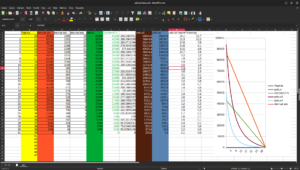
Bylo nezbytné vytvořit funkci novou. Blížila se logaritmické funkci. Při nízké teplotě má výstup poměrně dlouhý, rychle ale klesá, zpomaluje a blíží se nule. Vždy bude jeho výstupem ale minimálně 10 sekund, aby při teplotách kolem 40 ˚C nešla výstupní hodnota do mínusu. Díky tomu reaguje v kratších intervalech během teplot nad 20 ˚C. Na obrázku se jedná o tmavě červenohnědou křivku. Pokud je však v zóně závlaha dostatečná, kontrola vlhkosti zónu přeskočí.
Během spánku ještě počítač průběžně vyhodnocuje aktuální teplotu a porovnává ji s počáteční teplotou, kdy se uchyloval ke spánku. Pokud je aktuální teplota o 7 °C vyšší, spánek se přeruší a provede se standatní kontrola vlhkosti. Jedná se zejména o prudké oteplování po ránu s přímým sluníčkem, které je stále nízko a stihne vysušit většinu květináčů během krátké doby.
Kontrola stavu
Protože Pico je mikropočítač, nemá žádné periferie jako je bluetooth nebo wifi. Jak tedy při dlouhodobém provozu kontrolovat jeho stav? V jednoduchosti je síla a nejjednodušší výstupní perieferie je led dioda. Protože má Pico nespočet pinů, použil jsem RGB diodu z ledpásku. Díky PWM, které je, jako všechno, v MicroPythonu velice jednoduché můžu jednotlivé akce oznamovat probliknutím specifické barvy. Každý důležitý krok má proto svou stavovou barvu. Barvičky má každý rád!
V současnosti program eviduje start globálního cyklu (jak je zalito, jde se spát dle teploty okolí a poté začínáme znovu), lokálního cyklu (zalévá se, dokud není zalito), zaléváme, nezaléváme, vyčkáváme po zalití 5 s na další kontrolu vlhkosti (PWM RGB animace), hotovo, chyba a časová indikace spánku podobně jako bijící zvon u kostela.
Chybový status zabliká po dokončení zalévacího cyklu, pokud dlouhodobě není dosaženo skutečně zalitého stavu v jedné nebo více zón. Znamená to, že někde došla voda, nebo v horším případě upadla hadice a voda může odtékat někam na zem. Počítač proto po zahlášení chyby vyčkává tolik minut, kolikrát se pokusil zónu neúspěšně zalít, aby nedošlo k nějakému většímu problému. Upozorní výrazným rudým zablikáním po 12 a více nezdařených pokusech.
Během spánku jednou za minutu počítač po kontrole teploty oznámí zbývající čas krátkým probliknutím. Delší žlutá barva znamená 10 hodin a krátká oranžová jsou hodiny navíc. 1 žlutá a 2 oranžové tak znamená zbývajících 12 hodin spánku.
Manuální ovládání
K Picu mám přímo připojené tlačítko, kterým v přerušení můžu úplně přetnout spánkový cyklus. Přerušení změní pouze globální proměnnou, které se však periodicky testuje hodnota právě při spánkových cyklech. Konkrétně tedy v hlavním spánkovém cyklu a v cyklu odkladu po zahlášení chyby při nedostatku vody. Toto řešení přerušení se mi nakonec projevilo jako problematické, protože vlivem nějakého rušení se funkce spouštěla spontánně. Přerušení řeším proto běžným přepínačem, kterým přímo odpojuji napájení počítače. Reset však při současném fungování téměř není nutný.
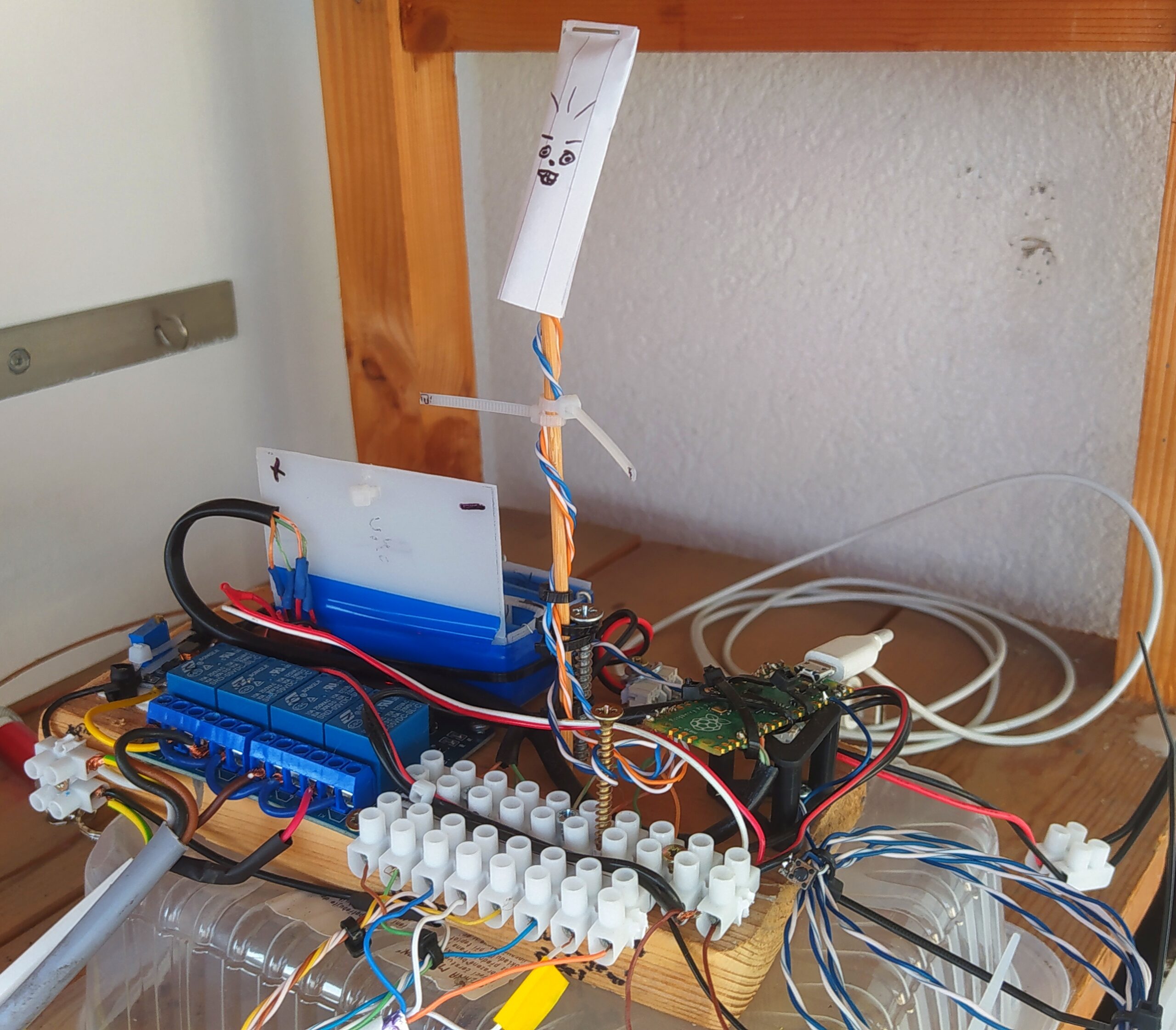
Konečné řešení
Jak si tedy celý systém představit? Je to změť drátů a DPS na kousku dřevěné desky, ze které ústí několik svorkovnic. Z nich pokračuje pavouk vodičů sdružených i nesdružených nenápadně do všech koutů lodžie. Uzemňovací vodič je veden zvlášť pro čerpadla a čidla. V květináčích jsou vnořená čidla do hlíny a nad úplně všemi květináči vedou hadičky se zalévacími otvory.










Nezbývá, než doufat, že bude toto řešení dostatečné. Je však navržené adaptovatelně a já jsem otevřen dalším vylepšením. Těším se na léto, kdy budou teploty ještě vyšší a skutečně se funčknost projeví v extrémních podmínkách.
Tentokrát si kávu vychutnám při střídavém cvrkotu vody a blikajících čidlech v okolních květináčích. :)
Samotný kód
Pro zajímavost přikládám rozpracovaný a aktuálně běžící zdroják.
from machine import Pin, PWM, ADC
import utime
zelena = Pin(25,Pin.OUT)
zelena.high()
utime.sleep(0.5)
zelena.low()
cykly = 0
cyklylok = 0
chybazona1 = 0
chybazona2 = 0
chybazona3 = 0
chybazona4 = 0
chybaprum = 0
posledniteplota = 0
superpreruseni = False
sensor_temp = ADC(4)
conversion_factor = 3.3 / (65535)
#GPIO SENZORY
senz1 = Pin(21,Pin.IN)
senz2 = Pin(20,Pin.IN)
senz3 = Pin(19,Pin.IN)
senz4 = Pin(18,Pin.IN)
#NAPÁJENÍ SENZORŮ
senznap1 = Pin(2,Pin.OUT)
senznap2 = Pin(3,Pin.OUT)
senznap3 = Pin(4,Pin.OUT)
senznap4 = Pin(5,Pin.OUT)
#SIGNÁL PRO ČERPADLA
cerpsig1 = Pin(9,Pin.OUT)
cerpsig2 = Pin(6,Pin.OUT)
cerpsig3 = Pin(7,Pin.OUT)
cerpsig4 = Pin(8,Pin.OUT)
#VYPNOUT VŠECHNY RELÉ
cerpsig1.high()
cerpsig2.high()
cerpsig3.high()
cerpsig4.high()
#odpojenetl = Pin(0, Pin.IN, Pin.PULL_UP)
resettl = Pin(1, Pin.IN, Pin.PULL_DOWN)
pocetblik = 0
reverz = 1 # obrácení naměřené hodnoty násobkem nuly (neponořená čidla)
def status(id):
global chybaprum
global superpreruseni
jas = 10
delka = 0.5
blue = PWM(Pin(15))
red = PWM(Pin(14))
green = PWM(Pin(13))
blue.freq(1000)
green.freq(1000)
red.freq(1000)
if id == "hotovo":
blue.duty_u16(0)
green.duty_u16(int(30000/jas))
red.duty_u16(0)
utime.sleep(delka)
blue.duty_u16(0)
green.duty_u16(0)
red.duty_u16(0)
print(id)
if id == "otepleni":
blue.duty_u16(int(10000/jas))
green.duty_u16(int(65000/jas))
red.duty_u16(int(10000/jas))
utime.sleep(0.5)
blue.duty_u16(0)
green.duty_u16(int(50000/jas))
red.duty_u16(int(50000/jas))
utime.sleep(0.5)
blue.duty_u16(int(10000/jas))
green.duty_u16(int(10000/jas))
red.duty_u16(int(65000/jas))
utime.sleep(0.5)
blue.duty_u16(0)
green.duty_u16(0)
red.duty_u16(0)
print(id)
if id == "superpr":
sp = 0
while sp < 4:
zelena.high()
utime.sleep(0.05)
zelena.low()
utime.sleep(0.05)
sp += 1
print(id)
if id == "chyba":
if chybaprum != 0:
chp = chybaprum*2
else:
chp = 4
ch = 0
while ch<chp:
blue.duty_u16(0)
green.duty_u16(0)
red.duty_u16(int(65536))
utime.sleep(delka/5)
blue.duty_u16(0)
green.duty_u16(0)
red.duty_u16(0)
ch = ch+1
utime.sleep(delka/chp)
print(id)
print("čekám",chp,"minut, aby se zamezilo problémům")
davky = 30 #sekundové
index = 0
while index < chp*60 and superpreruseni != True:
index += davky
utime.sleep(davky)
if superpreruseni == True:
superpreruseni = False
if id == "alive":
global indexcekani
global cekam
zbyva = (cekam-indexcekani)/3600
zbv = 0
zbyvaplus = 0
if zbyva >= 10:
blue.duty_u16(0)
green.duty_u16(int(30000/jas))
red.duty_u16(int(35535/jas))
utime.sleep(0.2)
blue.duty_u16(0)
green.duty_u16(0)
red.duty_u16(0)
utime.sleep(0.2)
zbyva-=10
zbyvaplus = 10
while zbv<zbyva:
blue.duty_u16(0)
green.duty_u16(int(10000/jas))
red.duty_u16(int(25535/jas))
utime.sleep(0.1)
blue.duty_u16(0)
green.duty_u16(0)
red.duty_u16(0)
utime.sleep(0.1)
zbv = zbv+1
print(id)
if id == "zalevani":
blue.duty_u16(int(65535/jas))
green.duty_u16(int(10000/jas))
red.duty_u16(0)
utime.sleep(delka)
blue.duty_u16(0)
green.duty_u16(0)
red.duty_u16(0)
print(id)
if id == "nezalevani":
blue.duty_u16(int(20000/jas))
green.duty_u16(int(50000/jas))
red.duty_u16(int(20000/jas))
utime.sleep(delka)
blue.duty_u16(0)
green.duty_u16(0)
red.duty_u16(0)
print(id)
if id == "ztlumit":
blue.duty_u16(0)
green.duty_u16(0)
red.duty_u16(0)
print(id)
if id == "cyklus_start":
cs = 0
while cs<2:
blue.duty_u16(int(30000/jas))
green.duty_u16(0)
red.duty_u16(int(65535/jas))
utime.sleep(delka/2)
blue.duty_u16(0)
green.duty_u16(0)
red.duty_u16(0)
cs = cs+1
utime.sleep(delka/2)
print(id)
if id == "cyklus_loop":
css = 0
while css<3:
blue.duty_u16(int(65535/jas))
green.duty_u16(0)
red.duty_u16(int(25000/jas))
utime.sleep(delka/3)
blue.duty_u16(0)
green.duty_u16(0)
red.duty_u16(0)
utime.sleep(delka/2)
css = css+1
print(id)
if id == "spanek":
global pocetblik
pcb = 0
pocetplus = 0
if pocetblik >= 10:
blue.duty_u16(0)
green.duty_u16(int(60000/jas))
red.duty_u16(int(65535/jas))
utime.sleep(2)
blue.duty_u16(0)
green.duty_u16(0)
red.duty_u16(0)
utime.sleep(delka)
pocetblik-=10
pocetplus = 10
while pcb<pocetblik:
blue.duty_u16(0)
green.duty_u16(int(30000/jas))
red.duty_u16(int(65535/jas))
utime.sleep(delka/(pocetblik*2))
blue.duty_u16(0)
green.duty_u16(0)
red.duty_u16(0)
utime.sleep(delka/(pocetblik/2))
pcb = pcb+1
print(id,pocetblik+pocetplus,"hodin")
if id == "mokreni":
mok = 0
while mok<65535:
blue.duty_u16(int(mok/jas))
green.duty_u16(int(25000/jas))
red.duty_u16(int((40535-round(0.618524453*mok))/jas))
mok = mok+2
utime.sleep(0.00001)
blue.duty_u16(0)
green.duty_u16(0)
red.duty_u16(0)
print(id)
# Konec funkce status
def zalij(zona):
global chybazona1
global chybazona2
global chybazona3
global chybazona4
global chybaprum
status("zalevani")
#INDIVIDUÁLNÍ DÉLKY ZALÉVÁNÍ
cas1 = 13 #meloun policka + regal nahore
cas2 = 9 # regal dole vlhke
cas3 = 17 # regal naproti nahore
cas4 = 17 # truhliky a okno
if zona == 1:
cerpsig1.low()
utime.sleep(1)
cerpsig1.high()
utime.sleep(1)
cerpsig1.low()
utime.sleep(1)
cerpsig1.high()
utime.sleep(0.1)
cerpsig1.low()
utime.sleep(cas1)
cerpsig1.high()
chybazona1 += 1
print("zóna", zona, "| opakováno", chybazona1,"x")
if zona == 2:
cerpsig2.low()
utime.sleep(1)
cerpsig2.high()
utime.sleep(1)
cerpsig2.low()
utime.sleep(1)
cerpsig2.high()
utime.sleep(0.1)
cerpsig2.low()
utime.sleep(cas2)
cerpsig2.high()
chybazona2 += 1
print("zóna", zona, "| opakováno", chybazona2,"x")
if zona == 3:
cerpsig3.low()
utime.sleep(1)
cerpsig3.high()
utime.sleep(1)
cerpsig3.low()
utime.sleep(1)
cerpsig3.high()
utime.sleep(0.1)
cerpsig3.low()
utime.sleep(cas3)
cerpsig3.high()
chybazona3 += 1
print("zóna", zona, "| opakováno", chybazona3,"x")
if zona == 4:
cerpsig4.low()
utime.sleep(1)
cerpsig4.high()
utime.sleep(1)
cerpsig4.low()
utime.sleep(1)
cerpsig4.high()
utime.sleep(0.1)
cerpsig4.low()
utime.sleep(cas4)
cerpsig4.high()
chybazona4 += 1
print("zóna", zona, "| opakováno", chybazona4,"x")
def restart(pin):
# global superpreruseni
resettl.irq(handler=None)
# status("superpr")
# superpreruseni = True
# utime.sleep(0.5)
resettl.irq(handler=restart)
def kontrola():
global chybazona1
global chybazona2
global chybazona3
global chybazona4
global chybaprum
global hodnota
hodnota = 0
status("kontrola")
senznap1.high()
utime.sleep(0.5)
if senz1.value() == 1*reverz:
senznap1.low()
zalij(1)
else:
senznap1.low()
status("nezalevani")
hodnota += 1
chybazona1 = 0
utime.sleep(0.3)
senznap2.high()
utime.sleep(0.8)
if senz2.value() == 1*reverz:
senznap2.low()
zalij(2)
else:
senznap2.low()
status("nezalevani")
hodnota += 1
chybazona2 = 0
utime.sleep(0.3)
senznap3.high()
utime.sleep(0.5)
if senz3.value() == 1*reverz:
senznap3.low()
zalij(3)
else:
senznap3.low()
status("nezalevani")
hodnota += 1
chybazona3 = 0
utime.sleep(0.3)
senznap4.high()
utime.sleep(0.5)
if senz4.value() == 1*reverz:
senznap4.low()
zalij(4)
else:
senznap4.low()
status("nezalevani")
hodnota += 1
chybazona4 = 0
utime.sleep(0.3)
if chybazona1 > 12 or chybazona2 > 12 or chybazona3 > 12 or chybazona4 > 12:
chybaprum = round((chybazona1+chybazona2+chybazona3+chybazona4)/4);
status("chyba")
else:
status("hotovo")
#KONEC FUNKCE KONTROLA/ZALÉVÁNÍ
resettl.irq(trigger=Pin.IRQ_RISING, handler=restart) # při stisku tlačítka funkce restart
status("cyklus_start")
while True: # HLAVNÍ SMYČKA NEKONEČNÁ
cykly += 1
utime.sleep(0.5)
hodnota = ""
status("cyklus_start")
print(cykly,"hlavní cyklus")
while hodnota != 4: #LOKÁLNÍ SMYČKA BĚŽÍ DOKUD VŠECHNY ZÓNY NEHLÁSÍ ZALITO (1+1+1+1)
cyklylok += 1
print(cyklylok,"zalévací cyklus")
kontrola()
utime.sleep(0.5)
if hodnota != 4:
print("zkusíme to znovu")
print("vyčkáme 5s na promokření hlíny")
status("mokreni")
if hodnota == 4:
cyklylok = 0
status("cyklus_loop")
#KONEC LOKÁLNÍ SMYČKY
print(hodnota)
#VÝPOČET DLE TEPLOTY
reading = sensor_temp.read_u16() * conversion_factor
temperature = 29 - (reading - 0.706)/0.001721
posledniteplota = temperature
#LINEÁRNÍ FUNKCE 24h-0
#cekam = (115200-temperature*2880)/2
#LOGARITMICKÁ FUNKCE 13h-0
#č 1 cekam = 1000*5000*10/(temperature*temperature*temperature)-781
#LOGARITMITCKÁ FUNKCE KLIDNĚJŠÍ 26h-250s
cekam = 2000*5000/(temperature*temperature)-6000 # 10C=26H, 20C=5,3H, 30C=1,4H, 40C=4M
if cekam < 10: #Minimálně 10s
cekam = 10
print("Teplota nyní: ",temperature,"°C a čekám tím pádem ",cekam,"s = ",cekam/60,"min = ",cekam/60/60," hodin")
pocetblik = round(cekam/3600)
status("spanek")
#VYČKÁVACÍ CYKLUS MOŽNÝ PŘERUŠIT
indexcekani = 0
davkovani = 60 #sekundové
while indexcekani < cekam and superpreruseni != True:
indexcekani += davkovani
utime.sleep(davkovani)
status("alive")
#HLÍDÁNÍ TEPLOTY
reading = sensor_temp.read_u16() * conversion_factor
prubeznateplota = 29 - (reading - 0.706)/0.001721
if prubeznateplota > (posledniteplota + 7): #je-li o 7°C vyšší teplota než minule
status("otepleni")
print("Aktuální teplota - ",prubeznateplota,"°C - je vyšší o 7°C! Teplota z minulého cyklu byla ",posledniteplota,"°C")
superpreruseni = True
if superpreruseni == True:
superpreruseni = False
status("cyklus_loop")